Aéronef¶
Pièce centrale de la flotte. Deux rôles : scout aérien autonome et relais radio pour les véhicules de surface.
Cellule retenue¶
AtomRC Swordfish PNP — fixed-wing V-tail bimoteur, 1200 mm d'envergure, 810 mm de longueur, mousse EPP.

AtomRC Swordfish PNP 1200 mm — fixed-wing V-tail bimoteur en mousse EPP. Photo : AtomRC / SkyZoneFPV.
Pourquoi le Swordfish¶
| Critère | Choix Swordfish |
|---|---|
| Type | Fixed-wing classique, V-tail, 2 moteurs avant |
| Envergure | 1200 mm |
| Endurance | 60–90 min sur pack 4S 21700 |
| Décollage | Lancement à la main (AUW < 2 kg) |
| Atterrissage | Belly landing sur herbe/dirt, ~30–50 m de couloir |
| Charge utile | Confortable (~300–400 g disponibles) |
| Configuration ArduPlane | Standard, pas de QuadPlane |
| Crash risk premier vol | Faible (pas de transition tricky) |
| Stock CA | DroneDynamics — vérifier avant commande |
| Prix | ~260 $CAD |
Décision tranchée : VTOL abandonné. L'AtomRC Swordfish n'a pas de version VTOL (la confusion initiale venait d'une erreur dans une recherche externe). Pour les opérations en terrain reculé au Québec, trouver un couloir d'atterrissage de 30–50 m sur un chemin forestier ou un dégagement n'est pas un problème en pratique.
Le format PNP (Plug and Play) inclut moteurs, ESCs et servos pré-installés. Il reste à intégrer l'avionique (cerveau, GPS, radio, caméras) et le pack batterie.
Avionique¶
| Composant | Rôle |
|---|---|
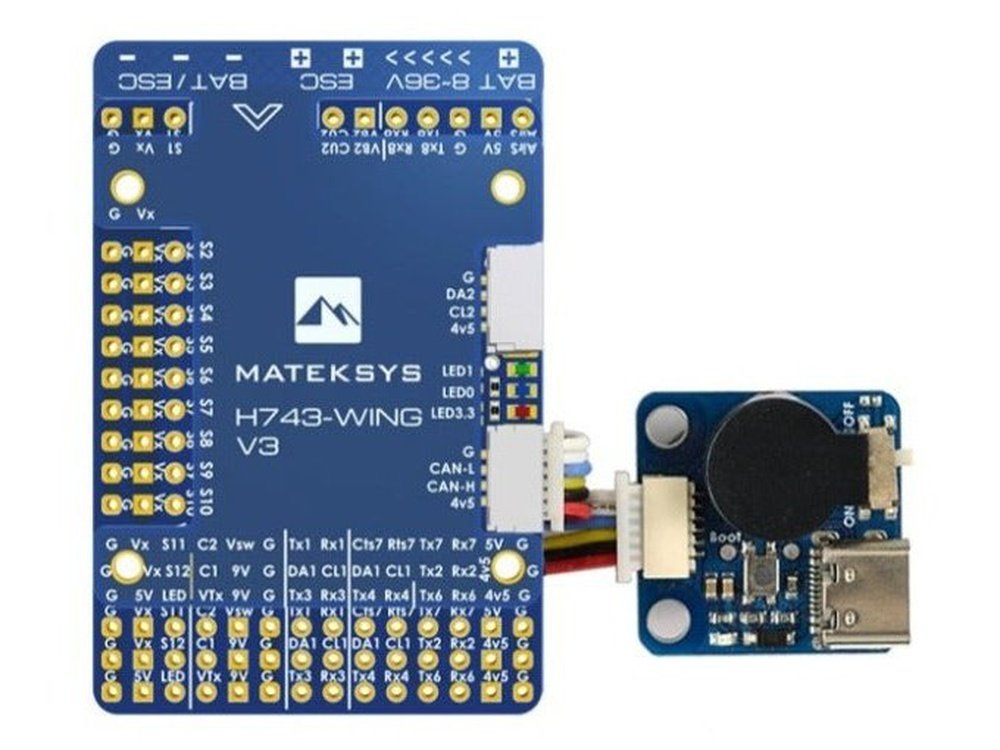
| Matek H743-WING V3 | Cerveau, exécute ArduPlane (config Plane standard) |
| Matek ASPD-4525 | Sonde Pitot I²C, vitesse air → ArduPilot dérive direction et force du vent |
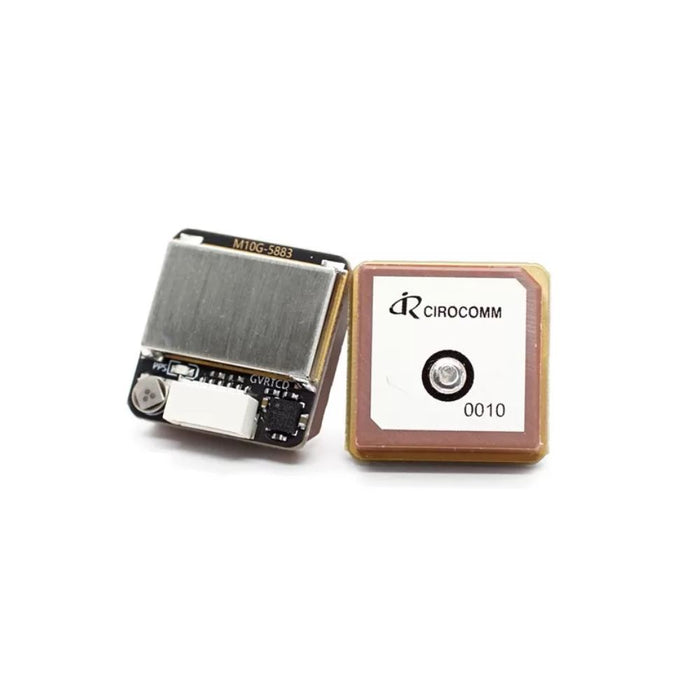
| MicoAir M10G-5883 | GPS + compas, 4 constellations, drop-in compatible |
| ExpressLRS Nano 915 RX (×1, lien base↔avion) | Reçoit RC + MAVLink depuis base. Sortie CRSF → FC. |
| ExpressLRS TX module bare board 915 MHz (×1, lien avion↔surface, ex. HappyModel ES915TX V2) | Le Pi companion l'alimente en CRSF via UART. Émet vers RX rover/bateau. Bidirectionnel pour télémétrie surface. |
| VTx Foxeer Reaper Nano + caméra Caddx Ant | POV pilotage analogique 5.8 GHz |
| RunCam Thumb Pro 4K W | Captation HD locale, GyroFlow, 16 g |
| Pack Li-ion 4S2P 21700 Molicel P45B | Énergie (~300–400 g) |


Charge utile non-vol : ~60 g (caméras + radios + antennes). Marge largement confortable sur la capacité d'emport du Swordfish.
Modes de vol (ArduPlane standard)¶
Pilotage manuel et assisté¶
| Mode | Comportement |
|---|---|
| MANUAL | Sticks directs vers servos. Aucune stabilisation. À éviter sauf debug. |
| STABILIZE | Stabilisation gyro, retour au niveau quand sticks centrés. Pilotage manuel pur. |
| FBWA (Fly-By-Wire A) | Pilotage assisté avec limite d'inclinaison. Mode FPV principal. |
| FBWB (Fly-By-Wire B) | FBWA + maintien d'altitude et de vitesse. |
Pilotage autonome¶
| Mode | Comportement |
|---|---|
| CRUISE | Régulateur : maintient cap compas + altitude + vitesse. Lâcher des manettes possible. |
| LOITER | Orbite GPS continue autour d'un point. Mode central pour relais radio. |
| AUTO | Exécute une mission de waypoints chargée à l'avance. |
| TAKEOFF | Décollage automatique après lancer manuel (détection de propulsion). |
| LAND | Atterrissage automatique vers un waypoint avec descente glissée. |
Tuning et sécurité¶
| Mode | Comportement |
|---|---|
| AUTOTUNE | Calibre automatiquement les PIDs en vol. |
| RTL | Retour automatique au point de décollage. |
Profil de mission type · Relais radio bateau¶
- Lancement — main throw face au vent, mode FBWA, montée à pleine puissance.
- Transit — bascule en CRUISE, montée à ~100 m AGL, navigation vers la zone d'opération.
- Suivi orbital — mode LOITER ou Follow GPS centré sur la position du bateau. Cercle 30–40 m de rayon, vitesse de croisière ~50 km/h.
- Relais MAVLink — le Pi companion (
mavlink-router) forwarde les paquets entre le FC (lien base) et le TX module 915 dédié (lien surface). Filtrage parsystem_id. Cf.architecture.md§Relais aérien. - Batterie 25 % → RTL automatique vers point de décollage.
- Approche → mode LAND ou pilotage manuel FBWA.
- Belly landing — sur herbe ou chemin forestier dégagé.
- Swap batterie — ~2 minutes au sol, puis relancement à la main.
Sécurité et fail-safe¶
Tous natifs ArduPilot, configurables via paramètres :
- Perte de liaison RC → mode RTL après délai configuré.
- Perte de liaison GCS → continue mission AUTO si en cours, sinon RTL.
- Batterie faible (seuil 1) → RTL.
- Batterie critique (seuil 2) → LAND immédiat à la position courante.
- Geofence → polygone GPS configuré avant chaque mission ; sortie déclenche RTL.
Décisions tranchées¶
Vidéo POV : analogique 5.8 GHz¶
Trois raisons : 1. Latence nulle déterministe — encodage NTSC/PAL à la vitesse de la lumière, pas de buffering. 2. Masse minimale — VTx + micro-caméra <6 g combinés. 3. Dégradation gracieuse au-dessus de l'eau et en limite de portée. Le numérique gèle l'image au seuil de perte de paquets ; l'analogique ajoute du bruit progressif.
L'enregistrement HD reste séparé sur la RunCam Thumb Pro 4K. Pas de compromis qualité de production.
Pas de relais vidéo 5.8 GHz¶
L'avion sert de plateforme d'observation pour les véhicules de surface. Eux enregistrent localement et transmettent par photo-on-demand sur LoRa.
Connecteur de charge¶
Phase 1 : XT60 standard branché directement sur le pack 4S. Simple, fiable, c'est le standard de l'industrie RC.
Phase 4–5 (exploration) : design d'un système de charge sans câble (XT60 magnétique breakaway, ou plaque de contact pogo pins). À designer une fois l'expérience de vol accumulée et les opérations de terrain rodées.
Questions ouvertes / à valider¶
- Caméra HD — RunCam Thumb Pro suffit-elle, ou viser une GoPro légère pour qualité de production vidéo si on veut sortir du contenu pro ?
- Stabilisation — la stabilisation Gyroflow post-prod est probablement suffisante, à valider sur premières prises de vue. Mini-gimbal seulement si besoin avéré.
- Antenne LoRa au sol — directionnelle (yagi) sur mât pour gain max sur une zone connue, vs omnidirectionnelle pour flexibilité. Probablement omni en V1, yagi en option Phase 2.
- Système de lancement — main throw simple OK pour AUW < 2 kg. Bungee envisageable si charge utile augmente significativement (capteurs supplémentaires, antenne plus grosse).