Bateau — Catamaran d'exploration¶
Le bateau est le 4e véhicule de la flotte Fleet. Plateforme nautique pour le scouting de rivières (rapides, méandres, portages) avant descente en canoë, et captation au ras de l'eau pour le contenu.
Pivot : monocoque imprimé → catamaran démontable¶
La V0 envisageait un monocoque imprimé 3D en PETG (Phase 5 de la roadmap). Cette piste est abandonnée au profit d'un catamaran à pontons PVC + cadre aluminium démontable.
| Aspect | Monocoque PETG | Catamaran PVC + alu (v1) |
|---|---|---|
| Étanchéité | Critique (un point de fuite = perte totale) | Pontons fermés par end caps, faisceaux exposés mais non immergés |
| Stabilité | Auto-redressement requis (CG bas + pont étanche) | Stabilité intrinsèque de la géométrie catamaran |
| Coût matière | ~50 $CAD filament + temps impression | ~415 $CAD pré-taxes (matériaux quincaillerie québécoise) |
| Démontage transport | Sections boulonnées + joints TPU | Tout hand-tightenable (étoiles + écrous papillon), aucun outil |
| Risque crash | Coque ruinée = reprint | Un ponton percé = remplacement 27 $ chez Home Depot |
| Sourcing | Imprimante locale | 100 % big-box Québec (Home Depot, Rona, Amazon.ca, Fastenal CA) |
Le catamaran est plus réparable sur le terrain (un ponton percé se remplace en grande surface) et plus portable (démontable en sticks linéaires qui rentrent à plat).
Architecture v1¶
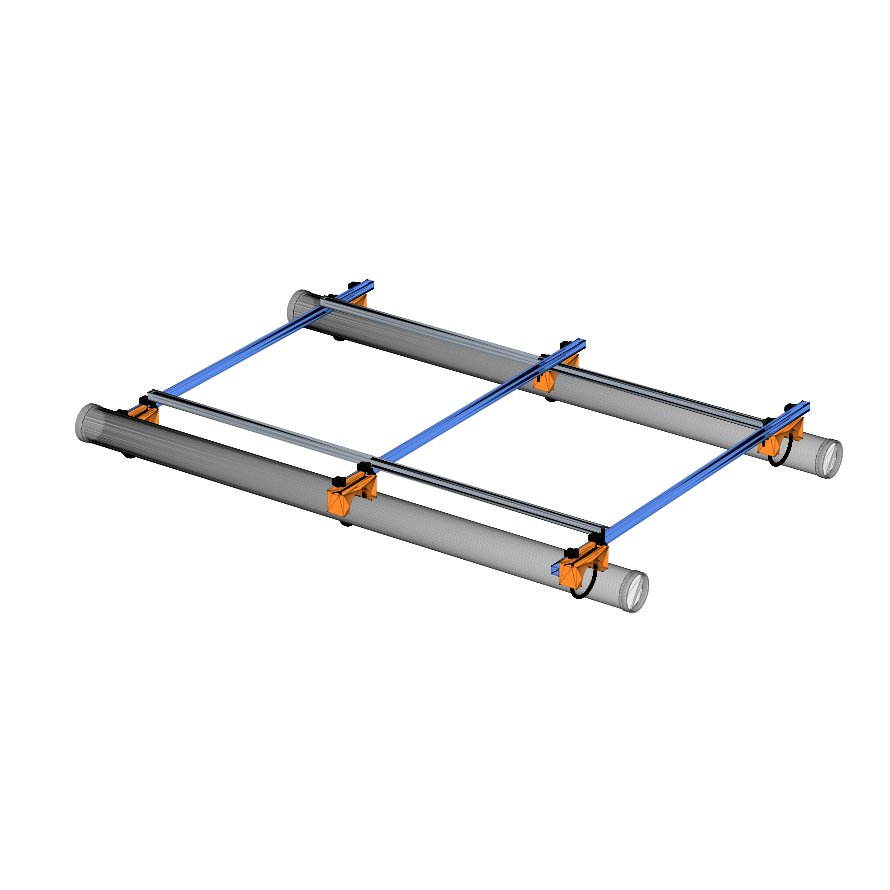
Catamaran v1 — vue iso de l'assemblage complet. Rendu généré depuis le modèle build123d (catamaran.py).
Hiérarchie d'assemblage¶
flowchart TD
Catamaran["Catamaran v1<br/>1700 × 1100 mm pont utile"]
Pontoons["Pontons (×2)<br/>PVC SCH40 4"<br/>2000 mm chacun"]
EndCaps["End caps PVC (×4)"]
Frame["Cadre aluminium<br/>tube 1" × 1/16" wall"]
CrossBeams["Cross beams (×3)<br/>1400 mm<br/>x = -700, 0, +700"]
Rails["Rails longitudinaux (×2)<br/>1700 mm<br/>y = ±450"]
Saddles["Saddles PETG (×6)<br/>imprimés 3D<br/>1 par intersection cross × ponton"]
UBolts["U-bolts M8 (×6)<br/>+ étoiles + rondelles<br/>fixent saddle au ponton"]
CornerBolts["Boulons M6 × 80 (×6)<br/>+ écrous papillon<br/>fixent rails aux cross beams"]
Catamaran --> Pontoons
Catamaran --> Frame
Catamaran --> Saddles
Pontoons --> EndCaps
Frame --> CrossBeams
Frame --> Rails
Saddles --> UBolts
Rails --> CornerBolts
CrossBeams --> CornerBoltsDimensions principales¶
| Élément | Valeur |
|---|---|
| Longueur pont | 1700 mm |
| Largeur pont | 900 mm (rails à y = ±450 mm) |
| Longueur pontons | 2000 mm chacun |
| Diamètre pontons | 4" PVC SCH40 (~114 mm OD) |
| Entr'axe pontons (centre à centre) | 1100 mm |
| Nombre de cross beams | 3 (à x = -700, 0, +700) |
| Hauteur pont au-dessus de l'eau | ~190 mm (sommet ponton + groove saddle) |
Source de vérité paramétrique : cad/parts/boat/catamaran/designs/v1.yaml. Toutes les pièces build123d (catamaran.py, frame.py, saddle.py) lisent ce YAML.
Cadre seul (sans pontons)¶
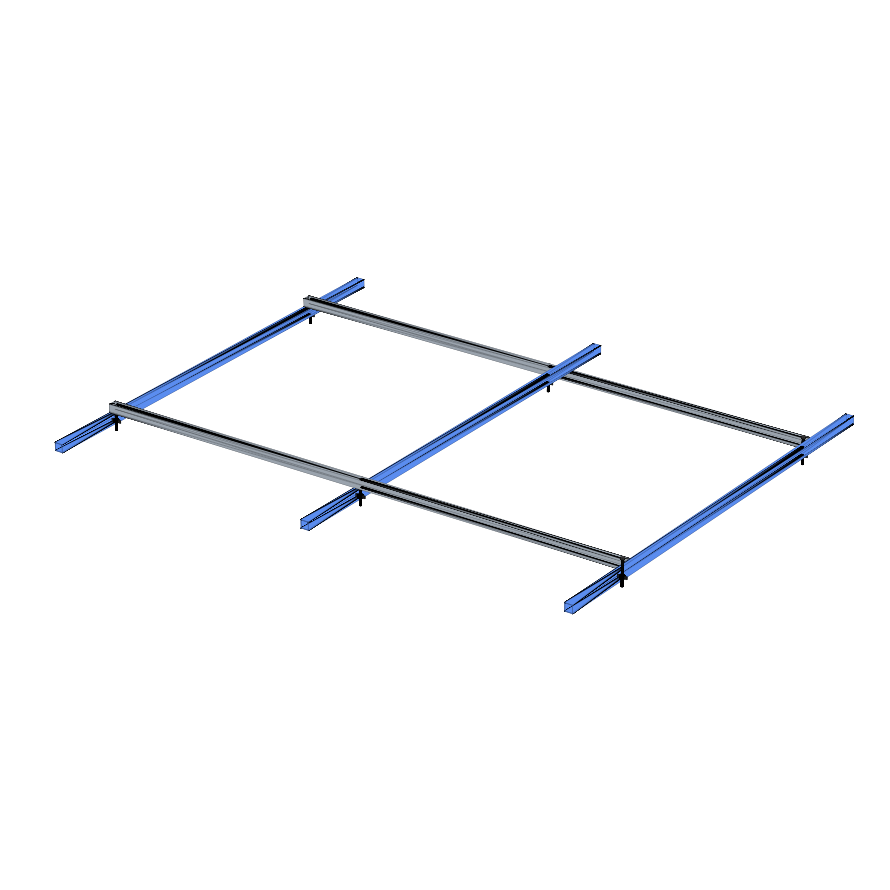
Cadre aluminium isolé — 3 cross beams 1400 mm + 2 rails longitudinaux 1700 mm, sticks de tube carré 1" × 1/16" wall.
Matériaux¶
| Matériau | Usage | Justification |
|---|---|---|
| PVC SCH40 4" (IPEX BDS sewer) | Pontons | Stocké Home Depot Canada en 10 ft, étanche par design, robuste aux chocs |
| Aluminium carré 1" × 1/16" wall (Paulin 142-433) | Rails + cross beams | Léger, anti-corrosion, stocké en 8 ft chez HD |
| PETG impression 3D | Saddles (×6) | Forme complexe (groove pour tube + cavity pour ponton), localement imprimable |
| Acier zingué M6 / M8 | Visserie | Étoiles M8 pour serrer pontons aux cross beams, écrous papillon M6 pour rails aux cross beams |
Note de design v2 : épaisseur de paroi alu réduite de ⅛" à 1/16" (Paulin big-box disponibilité, suffisant pour charge utile gear non-habitée). Bouls d'angle M6 passés de 70 mm → 80 mm (Rona Reliable stocke 80, pas 70).
Assemblage tool-free¶
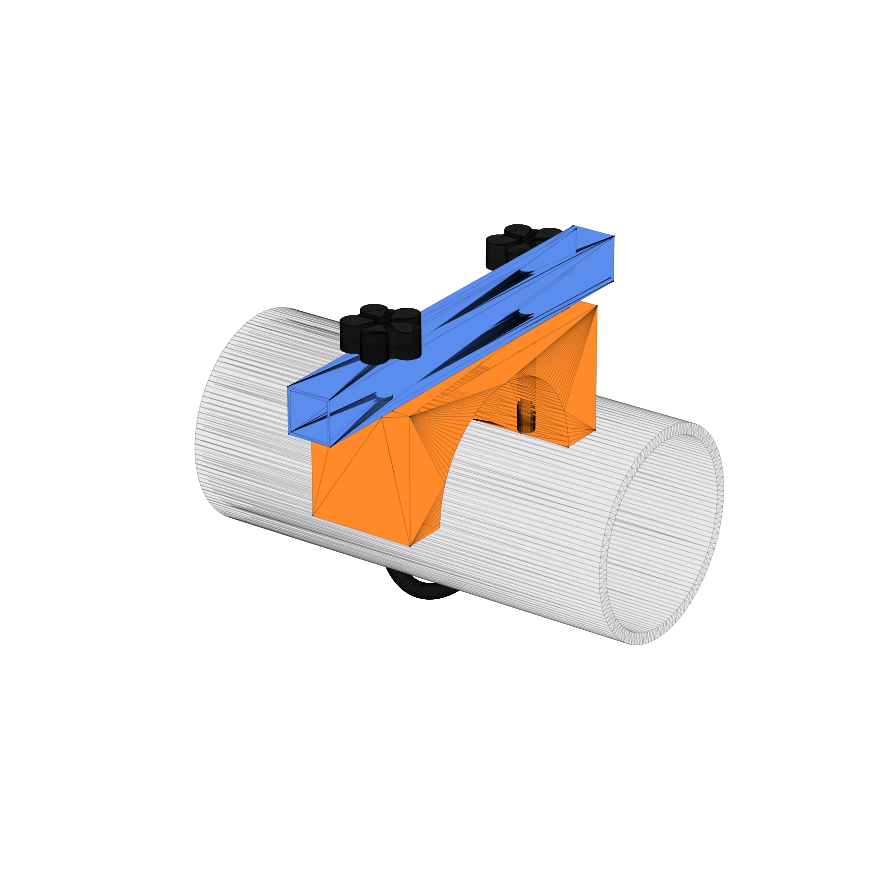
Saddle PETG — la pièce critique qui transfère la charge du cadre alu (cross beam carré 25 mm en bleu) au ponton PVC 4" (en gris). U-bolt M8 (noir) avec écrous papillon en bas.
- Poser les pontons à plat, ajuster les end caps.
- Pour chaque saddle (×6) : U-bolt M8 sous le ponton → saddle imprimé par-dessus → cross beam dans la rainure du saddle → rondelle + étoile M8 sur chaque jambe du U-bolt, serrage à main.
- Poser les 2 rails longitudinaux sur les cross beams. Boulon M6 hex traverse rail + cross beam → écrou papillon dessous.
- Démontage : inverse exact de la séquence. Aucune clé requise.
Coût et sourcing (v1)¶
Cible : tout le matériel disponible dans la province de Québec, idéalement en grande surface. Voir aussi parts-table.md pour la BOM complète à l'échelle flotte.
| Catégorie | Détail | $CAD |
|---|---|---|
| Pontons PVC | 2× tubes IPEX 4" × 10 ft (Home Depot) | 54 |
| End caps PVC | 4× (Home Depot) | 24 |
| Stock alu | 5× tubes Paulin 1"×8 ft (Home Depot) | 160 |
| Saddles PETG | 6× imprimés (filament Amazon.ca) | 42 |
| U-bolts M8 | 6× (Fastenal Canada) | 60 |
| Étoiles M8 | 12× (Amazon.ca) | 60 |
| Rondelles M8 | 12× (Home Depot) | 4 |
| Boulons M6 × 80 mm | 6× Reliable HBZM680MR (Rona) | 5 |
| Écrous papillon M6 | 6× (Home Depot) | 7 |
| Total pré-taxes | ~416 | |
| TPS+TVQ 14,975 % | ~62 | |
| Total TTC estimé | ~478 |
Détail par retailer + SKUs vérifiés : cad/parts/boat/catamaran/exports/catamaran_cost_report.md + catamaran_cut_list.md.
Statut¶
- ✅ Design v1 figé (
v1.yamlrevision 2, 2026-05-13) - ✅ CAD build123d complet : pontons, frame, saddles tous codés et paramétrés
- ✅ Export STEP + STL générés (
cad/parts/boat/catamaran/exports/) - ✅ BOM Québec costed avec SKUs Home Depot / Rona / Fastenal / Amazon.ca
- ✅ Cut list optimisée (first-fit-decreasing pour les sticks linéaires)
- 🟡 Procurement : pas encore commandé (priorité : Phase 1 aéronef)
- ✅ Propulsion : figée v3 (2026-05-15) — 2× Blue Robotics T200, différentiel pur (voir §Propulsion)
- 🟡 Avionique : FC Matek + GPS + RX ELRS — réutilise la stack du rover (Phase 3)
- ⏳ Pré-flight : test de flottabilité par calcul + maquette mousse
- ⏳ Première mise à l'eau : eau calme (piscine ou lac) avant rivière
Propulsion (v3 — figée 2026-05-15)¶
2× Blue Robotics T200 en poupe, différentiel pur (skid-steer, pas de gouvernail). ArduRover config Boat fait tout le mixing → le Boxer envoie juste throttle + lacet, zéro mix EdgeTX.
Placement¶
| Axe | Position | Raison |
|---|---|---|
| Y | ±550 mm (alignés sur les pontons) | Track 1100 mm = autorité de lacet max |
| X | ~+900 mm (clamp sur l'arrière du ponton, avant l'end cap) | Bras de levier ~0.9 m du CG |
| Z | axe hélice ≈ fond du ponton (prop_z_mm) |
Pontons = patins de protection en eau basse, pas de kick-up en v1 |
Bracket PETG démontable réutilisant le pattern saddle (1 U-bolt M8 sous le ponton, même quincaillerie). CAD : cad/parts/boat/thruster_mount/.
⚠ Question ouverte : à
prop_z_mm = -57, le berceau dépasse sous le ponton (hélice non protégée). Profondeur à trancher au test de flottabilité réel. Paramétrique dansv1.yaml.
Performance (chiffres à vérifier sur le performance chart Blue Robotics)¶
- Poussée combinée max ~100 N → bat un courant ≤ 1.5-2 m/s avec marge ; 2.5 m/s à pleine charge = près du plein gaz
- Pic électrique ~770 W (2× T200 @ 4S plein), croisière typique 150-300 W
Énergie — double pack + sélecteur marin¶
2× packs Li-ion 4S 30Ah (~444 Wh chacun). Sélecteur 1–2–BOTH–OFF (standard marin, type Blue Sea m-Series) :
| Position | Autonomie | Usage |
|---|---|---|
| 1 ou 2 | ~1.5-2 h | 1 pack — scouting court, van léger (~3.5 kg) |
| BOTH | ~3 h+ | 2 packs chargés ensemble (tensions égales — sinon courant d'égalisation dangereux) |
| OFF | — | kill switch maître intégré |
BOM propulsion¶
| Item | Qté | $CAD unit. | Source | Note |
|---|---|---|---|---|
| Blue Robotics T200 | 2 | ~280 | Blue Robotics (US) | ⚠ courtage : USPS pas UPS |
| BR Basic ESC R3 30A | 2 | ~60 | Blue Robotics (US) | Appairage officiel T200, marge ~25 % |
| Pack Li-ion 4S 30Ah | 2 | ~280 | À sourcer CA | ~444 Wh, ~3.5 kg pièce |
| Sélecteur batterie 1-2-BOTH-OFF | 1 | ~40 | Canadian Tire marine / Amazon.ca | Blue Sea m-Series ou équiv. |
| Disjoncteur 40-50A + câble 10 AWG étamé + connecteurs IP68 | — | ~70 | Amazon.ca / marine | Étamé pour le saumâtre |
| BEC avionique (sur pack principal) | 1 | ~20 | réutilise stack rover | FC Matek H743 partagé |
| Sous-total propulsion | ~1130 | Dépasse le ~500 $ budgété Phase 5 — à arbitrer |
Le FC / GPS / RX ne sont pas dans ce BOM : le bateau réutilise le Matek H743-WING V3 + ArduRover du rover (cf. architecture.md).
Questions ouvertes¶
- Flottabilité réelle vs charge utile : 2× pontons 4" × 2000 mm SCH40 → calcul théorique de la masse maximale flottable à faire. Cible : ~10 kg payload (batterie + avionique + caméras + marge).
- Stabilité sous charge asymétrique : un pont 1700 × 900 mm est large mais une masse off-center pourrait faire piquer du nez. Tests à faire.
- Rigidité du pont : 1" × 1/16" wall sur 1700 × 900 — assez raide pour ne pas fléchir sous le pilote ou le payload ? Si non, monter l'épaisseur de paroi en v2 ou ajouter une cross beam.
- Résistance latérale des saddles + U-bolts : sous charge de vagues, le ponton ne doit pas glisser le long du cross beam. Tests pratiques requis.
- Étanchéité des pontons : end caps standard probablement adéquats (pression hydrostatique modeste), mais joint silicone à prévoir si infiltration.
- Avionique étanche : où loger le FC + GPS + RX ? Compartiment scellé style rover sur le pont central, ou pod dédié sur un ponton ?
Pourquoi le rover avant le bateau¶
Le bateau hérite massivement de la stack rover :
- Firmware : même ArduRover (config Boat)
- Avionique : même Matek H743-WING V3 + GPS + RX ELRS
- Compartiment scellé : design dérivable directement du rover (compartment_base + lid + gasket TPU)
- Photo-on-demand + relais MAVLink : pattern éprouvé sur le rover
Faire fonctionner le rover (Phase 3) d'abord = de-risquer le bateau (Phase 5) sans coût de coque imprimée perdue dans une rivière.
Décisions tranchées¶
- Forme : catamaran 2 pontons (pas de monocoque imprimé)
- Pontons : PVC SCH40 4" × 2000 mm, end caps standards
- Cadre : tube alu 1" × 1/16" wall, 3 cross beams + 2 rails
- Assemblage : 100 % hand-tightenable, démontage sans outil
- Sourcing : tout en grande surface québécoise (Home Depot, Rona, Amazon.ca, Fastenal)
- Direction : différentiel par 2 moteurs (pas de gouvernail), config ArduRover Boat
- Propulsion : 2× Blue Robotics T200 en poupe, ESC BR Basic R3, double pack Li-ion 4S 30Ah + sélecteur marin 1-2-BOTH-OFF
- Avionique : réutilise la stack rover/aéronef Fleet (Matek H743-WING V3 + ArduRover Boat)