Rover — Véhicule terrestre¶
Le rover est le 3e véhicule de la flotte Fleet. Il joue un double rôle :
- Plateforme de validation du concept multi-véhicules (relais MAVLink via avion, photo-on-demand sur LoRa, coordination flotte) avant d'engager le coût et les risques du bateau.
- Véhicule de scouting / sentinelle à part entière, avec un mode caméra de sécurité différenciant.
Pourquoi le rover avant le bateau¶
| Aspect | Bateau | Rover |
|---|---|---|
| Étanchéité | Critique (un échec = perte totale) | Aucune |
| Récupération en cas de bug | Difficile (au milieu d'une rivière) | Tu marches le chercher |
| Lieu de test | Lac/rivière requis | Cour, stationnement, chemin forestier |
| Crash cost | Élevé (coque ruinée) | Faible (servo cassé) |
| Stack firmware | ArduRover | Même ArduRover |
| Stack comm | LoRa + relais avion | Même stack |
Tu valides 80 % de ce qui ferait peur sur le bateau sans risquer 1 m de coque imprimée 3D au fond d'une rivière.
Cas d'usage¶
Mode actif — Exploration télécommandée¶
- Pilotage live via FPV 5.8 GHz analogique en ligne de vue.
- Mode autonome GPS (waypoints) quand hors portée vidéo directe.
- Photo-on-demand via LoRa 915 MHz (relais avion si nécessaire) pour vérifier l'environnement à distance avant d'avancer.
Mode passif — Caméra de sécurité / sentinelle¶
- Stationné en bordure d'un chemin ou à l'entrée d'un campement.
- Moteurs au repos, VTx coupé, consommation ~50 mA (durée plusieurs jours sur un pack 4S).
- Capteur PIR déclenche l'alarme sur mouvement.
- Le companion computer capture une rafale de photos compressées et les transmet via LoRa.
- Alerte sonore + photos reçues à distance à la base.
- Mode actif réactivable à distance pour investiguer.
Cellule¶
Architecture mécanique¶
| Élément | Choix | Justification |
|---|---|---|
| Drive train | 1 moteur central brushed + transmission | ArduRover Ackermann natif, simplicité, coût minimum |
| Steering | Servo Ackermann sur essieu avant | Précision pilotage GPS et FPV |
| Suspension | Bras articulés type crawler avec amortisseurs | Garde au sol forêt, franchissement |
| Châssis | MyRCCar Mr. Crawley (1/10, version single-motor) | Modulaire, communauté massive, portal axles imprimables |
| Matériau structurel | PETG sur Neptune 4 | Résistance UV + impacts, étanchéité supérieure au PLA |
| Matériau joints | TPU | Étanchéité IP54 du compartiment électronique |
Caractéristiques résultantes : - Empattement ~313 mm (1/10 scale) - Garde au sol ~50 mm (portal axles) - AUW estimé : 2.5–3 kg - Vitesse de croisière : ~3–5 km/h (gearing crawler) - Rotation sur place : non (Ackermann pur, rayon de braquage classique)
Body et enclosure — châssis ouvert + compartiment scellé¶
Pas de carrosserie complète. À la place : châssis exposé + compartiment électronique scellé + tour pour caméras et antennes.
flowchart TD
Tower["**Tour PETG démontable** (180 mm)<br/>Antenne LoRa T au sommet<br/>GPS · 3× PIR à 120°<br/>Caméras Pi Cam 3 + Caddx Ant FPV"]
Interface["**Interface démontable**<br/>SMA bulkhead (coax LoRa)<br/>Molex Micro-Fit 12-pin (GPS UART · I²C compas · 3× PIR · Pi Cam · VTx · alim)"]
Cover["**Tonneau cover magnétique**<br/>Swap rapide de batterie sans outil"]
Compartment["**Compartiment scellé PETG**<br/>Joint TPU IP54<br/>Matek H743-WING V3 (FC)<br/>Pi Zero 2W (companion)<br/>RX ELRS 915 · ESC waterproof<br/>VTx 5.8 GHz · ATtiny85 wake-on-PIR"]
Battery["**Pack Li-ion 4S 21700** (Molicel P45B)<br/>Sous le compartiment · CG bas"]
Chassis["**Châssis Mr. Crawley** (1/10)<br/>Portal axles · Ackermann steering<br/>1 moteur 540 brushed central"]
Tower --> Interface
Interface --> Cover
Cover --> Compartment
Compartment --> Battery
Battery --> ChassisJustification position des éléments : - Antenne LoRa T au sommet de la tour : maximise la portée (au-dessus broussailles). Antenne intégrée fixe à la tour, pas de mât télescopique externe (joint mobile = risque étanchéité + casse en forêt dense). Le relais via avion compense la portée directe réduite. - 3 PIR à 120° : couverture sentinelle 360°. Permet d'utiliser le rover dans un campement isolé sans devoir l'orienter manuellement. Fusion logique côté ATtiny + Pi pour réduire les faux positifs (vent, animaux) ; trigger seulement si signal stable >500 ms. - Caméras à hauteur d'œil ~30 cm : POV utile en exploration + reconnaissance d'objet à distance pour sentinelle. - Batterie sous le compartiment : centre de gravité bas, stabilité accrue dans les pentes. - Tonneau cover magnétique : swap rapide de batterie sans dévissage. - Tour démontable : transport compact (le rover rentre à plat dans un coffre ou bay arrière). Interface 1× SMA bulkhead (coax LoRa) + 1× Molex Micro-Fit 12-pin pour tout le reste (GPS, I²C compas, 3× PIR, Pi Cam, VTx, alim). Compromis assumé : plus de connecteurs = plus de points d'échec, accepté pour le gain logistique.
IP rating cible : IP54 (résistance projections eau, rosée, pluie modérée). Joints TPU imprimés sur le couvercle du compartiment, presse-étoupes silicone aux passages de câbles, ESC waterproof crawler standard. Pas IP67 — overkill pour notre usage (pas de submersion prévue).
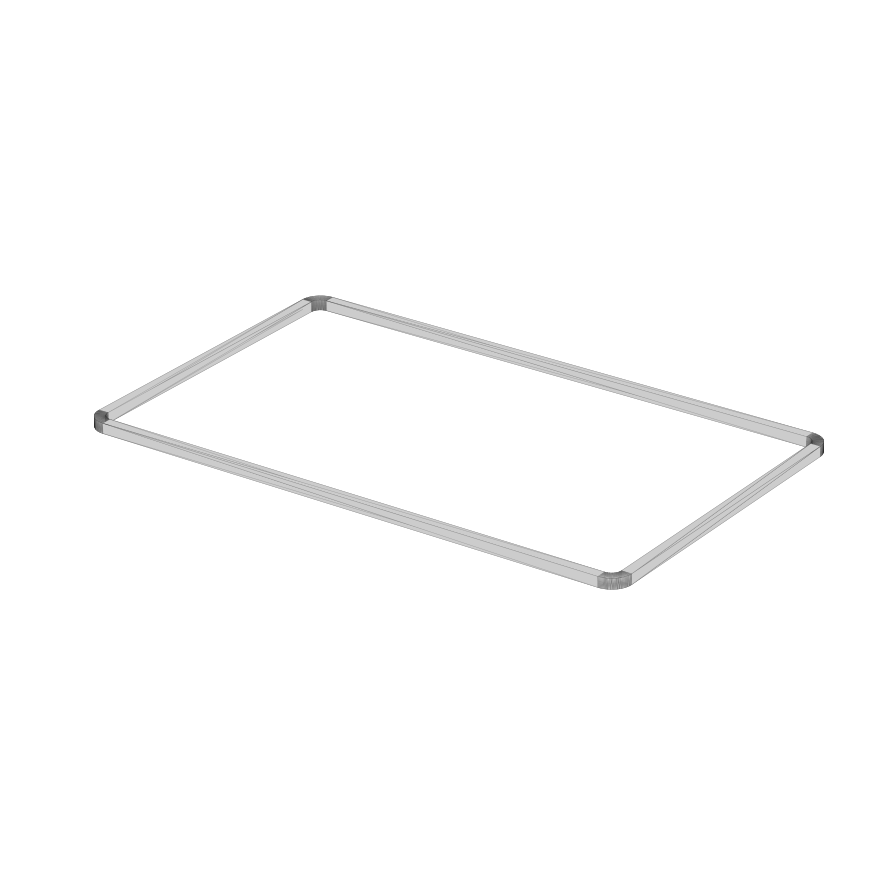
Joint TPU pour le compartiment scellé du rover. Cadre rectangulaire 140 × 85 mm, section 2.5 × 2.5 mm, comprimé à 50 % par les 8 vis M3 du couvercle. Imprimé en TPU 95A flat sur le bed. Première pièce CAD du compartiment terminée.
Avionique¶
| Composant | Rôle |
|---|---|
| Matek H743-WING V3 | Cerveau, exécute ArduRover (cohérence flotte avec avion) |
| MicoAir M10G-5883 | GPS + compas (M10Q Matek EOL → MicoAir drop-in) |
| ExpressLRS Nano 915 MHz | Lien contrôle/télémétrie + transport photos via MAVLink FTP |
| 1× ESC brushed waterproof (60 A continuous, crawler-grade) | Propulsion moteur central |
| 1× moteur 540 brushed crawler (35T typique) | Couple élevé, bas régime |
| 1× servo direction Ackermann (DSServo DS3218 25 kg·cm digital) | Direction front sur essieu Ackermann |
| Pack Li-ion 4S 21700 Molicel P45B | Énergie partagée avec avion (interchangeabilité) |
Caméras et capteurs¶
Caméra FPV analogique 5.8 GHz (pilotage live)¶
- Caddx Ant ou RunCam Phoenix 2 (~30 $CAD, ~3 g)
- VTx Foxeer Reaper Nano ou Happymodel OVX306 (~45 $CAD, ~3 g)
- Activable/désactivable via PWM ou relais piloté par le FC
- Total : ~75 $CAD, ~6 g
Photo-on-demand + cerveau du mode sécurité¶
- Raspberry Pi Zero 2W + Pi Camera Module 3 (12 MP autofocus)
- ~65 $CAD, ~15 g
- Connecté au FC via UART pour MAVLink FTP
- Alimenté en 5V via le BEC du FC
- Sourcing canadien : Canakit, BuyaPi.ca, PiShop.ca
Raspberry Pi Zero 2 W — quad-core ARM Cortex-A53 1 GHz, WiFi/BT intégrés. Companion computer du rover (et du bateau Phase 5) pour photo-on-demand et MAVLink FTP. Photo : Raspberry Pi Foundation.
Alternative économique : ESP32-CAM (~15 $CAD, ~10 g, qualité 2 MP). Acceptable pour MVP, mais Pi recommandé pour évolutivité (vision, sensors additionnels, code partagé avec bateau).
Capteurs de mouvement PIR (×3 à 120°)¶
- Module HC-SR501 ×3 (~15 $CAD pour le 3-pack, ~15 g total)
- Signal câblé à l'ATtiny85 wake controller (cf. §Wake-on-PIR), pas directement au GPIO du Pi
- L'ATtiny réveille le Pi via un MOSFET high-side sur le rail 5V quand au moins un PIR déclenche
- Logique anti-faux-positif côté Pi : ne capture/alerte que si signal stable >500 ms et confirmation contextuelle (heure du jour, signal multiple PIR si vent général)
- Couverture 360° utilisable en stationnement sentinelle libre
Wake-on-PIR — Circuit dédié basse consommation¶
Pour autonomie sentinelle multi-jours :
- ATtiny85 (~3 $CAD) en sommeil profond (~0.5 µA), réveil par pin change interrupt sur les 3 lignes PIR
- MOSFET P-canal IRLML6402 (~0.50 $CAD) en commutation high-side du rail 5V → Pi + (optionnel) FC
- Boot Pi ~25 s sur détection, capture rafale, alerte LoRa, retour sommeil après timeout silence
- Perfboard ~30×20 mm dans le compartiment scellé
- Consommation sentinelle armée : ~50 µA (ATtiny + PIRs) vs ~150 mA (Pi idle) → autonomie multipliée par ~3000
V1.5 décision ouverte : couper aussi l'alim FC + RX ELRS (économie supplémentaire ~50 mA, mais reboot complet ~30-60 s warm GPS) vs garder FC vivant pour réponse immédiate à une commande pilote.
Pas de RunCam 4K en V1¶
L'avion couvre déjà la captation HD aérienne. Ajouter un RunCam ground-level (16 g, 150 $CAD) seulement si tu trouves que les plans au sol manquent pour ton contenu Estran. Décision V2.
Mode sécurité — Diagramme d'état¶
stateDiagram-v2
[*] --> DISARMED
DISARMED --> ARMED_SLEEP : commande<br/>"ARM SECURITY"
ARMED_SLEEP --> BOOTING : ATtiny détecte PIR<br/>(1+ sur 3)<br/>→ MOSFET ON, Pi 5V
BOOTING --> ALARM : Pi up ~25 s<br/>lit GPIO PIR latch
ALARM --> ARMED_SLEEP : silence PIR 30 s
ALARM --> ACTIVE : commande<br/>"INVESTIGATE"
ACTIVE --> DISARMED : commande pilote
ARMED_SLEEP --> DISARMED : commande pilote
note right of ARMED_SLEEP
Pi OFF
ATtiny sommeil ~50 µA
end note
note right of ALARM
Filtre faux-positif (>500 ms stable)
Capture rafale 3 photos (Pi Cam)
Compress JPEG 320×240 qualité 30
MAVLink FTP via LoRa (relais avion)
Alerte sonore base
(optionnel) activer VTx
end noteModes ArduRover¶
| Mode | Comportement |
|---|---|
| MANUAL | Pilotage direct via radio |
| STEERING | Stabilisation gyro mais direction manuelle |
| HOLD | S'immobilise immédiatement |
| LOITER | Maintient sa position GPS (utile pour mode sécurité) |
| AUTO | Exécute une mission de waypoints |
| GUIDED | Va à un waypoint donné en temps réel par la base |
| RTL | Retourne au point de décollage |
| SMART_RTL | RTL en suivant le chemin parcouru (évite obstacles connus) |
BOM¶
Mécanique (3D-print + accastillage)¶
| Composant | Source | $CAD |
|---|---|---|
| Mr. Crawley STL license | MyMiniFactory | ~35 |
| Filament PETG ~2 kg (châssis + tour + bay) | Local 3D | ~50 |
| Filament TPU joints (~250 g) | Local 3D | ~15 |
| Roues + pneus 1/10 crawler (4×) | AliExpress | ~40 |
| Moteur 540 brushed 35T crawler | AliExpress | ~25 |
| ESC brushed waterproof 60 A | AliExpress | ~30 |
| Servo direction DSServo DS3218 25 kg·cm | AliExpress | ~20 |
| Boîte de transfert + 2× différentiels (kit Mr. Crawley) | AliExpress / Mr. Crawley parts | ~50 |
| Cardans dog-bones acier (4×) | AliExpress crawler parts | ~25 |
| Roulements 1/10 crawler full kit | AliExpress | ~20 |
| Visserie inox M2/M3 + accessoires | Local | ~15 |
| Sous-total mécanique | ~325 |
Électronique (réutilise stock Phase 1)¶
| Composant | Source | $CAD |
|---|---|---|
| Matek H743-WING V3 | déjà commandé Phase 1 (×2 pour avion + rover) | 0 |
| MicoAir M10G-5883 GPS | déjà commandé Phase 1 (commander 2 si possible) | 0 ou +22 |
| RX ExpressLRS Nano 915 MHz | déjà commandé Phase 1 (×3) | 0 |
| Pack Li-ion 4S 21700 | réutilise standard Fleet | 0 |
| Pi Zero 2W + Pi Camera Module 3 + câble | PiShop.ca | ~78 |
| VTx analogique + caméra FPV (Caddx Ant) | AliExpress | ~75 |
| Capteur PIR HC-SR501 (3-pack, 3× utilisés à 120°) | Amazon.ca | ~15 |
| Wake controller (ATtiny85 + IRLML6402 MOSFET + R/C + perfboard) | Digikey / stock | ~10 |
| Interface tour démontable (SMA bulkhead + Molex Micro-Fit 12-pin set) | Digikey / AliExpress | ~20 |
| Antenne LoRa 915 MHz T fixe + coax pigtail | AliExpress | ~12 |
| Sous-total électronique | ~210 |
Total Phase 3¶
| Catégorie | $CAD |
|---|---|
| Mécanique | ~325 |
| Électronique | ~210 |
| Sous-total HT | ~535 |
| Marge ~15 % (taxes, douanes, imprévus) | ~80 |
| Total réaliste | ~615 |
Décisions tranchées¶
- Châssis : 3D-print PETG sur Neptune 4, design MyRCCar Mr. Crawley (1/10 single-motor).
- Drive train : 1 moteur 540 brushed central + transmission + 2 différentiels.
- Steering : servo Ackermann front (DS3218 25 kg·cm).
- ESC : brushed waterproof crawler-grade 60 A.
- Body : châssis ouvert + compartiment électronique scellé PETG/TPU + tour démontable pour caméras et antennes + tonneau cover magnétique pour swap batterie rapide.
- IP rating cible : IP54 (rosée, pluie modérée tolérées, pas de submersion).
- FC : Matek H743-WING V3 (cohérence flotte avec avion).
- GPS : MicoAir M10G-5883 (Matek M10Q EOL), monté sur la tour.
- Caméra photo-on-demand : Pi Zero 2W + Pi Camera Module 3 (12 MP).
- Pas de relais vidéo 5.8 GHz : photo-on-demand via LoRa pour hors-portée, FPV analogique direct en portée.
- Antenne LoRa : T fixe intégrée au sommet de la tour, pas de mât télescopique externe.
- Couverture PIR : 3 PIR à 120° pour 360° en sentinelle libre.
- Power management : circuit wake-on-PIR ATtiny85 + MOSFET pour autonomie sentinelle multi-jours.
- Tour démontable : interface SMA + Molex Micro-Fit 12-pin pour transport compact.
- Mode sécurité inclus dans le MVP.
- Pas de RunCam HD en V1.
Décisions différées (V2 / V1.5)¶
- V1.5 — Détection visuelle CV : MobileNet-SSD via TFLite sur le Pi Zero 2W (~3-5 fps) en post-trigger PIR pour réduire les faux positifs (vent, branche, petit animal). Décision déclenchée après mesure du taux de faux positifs réel sur la première saison de tests.
- V1.5 — Coupure FC + RX en sentinelle : étendre wake-on-PIR pour aussi couper la 5V du FC/RX (économie ~50 mA), au prix d'un reboot warm GPS ~30-60 s à chaque détection. Décision après mesure de l'autonomie effective V1.
- V2 — Capteur thermique nocturne : FLIR Lepton 3.5 (~200 $USD) intégré à la tour pour sentinelle de nuit. Détection humains/grands mammifères 0 lux. Nécessite breakout SPI dédié et probablement passage à un Pi 4 ou CM4 pour le throughput.
- V2 — Mât télescopique LoRa : si les tests V1 montrent que le relais avion n'est pas systématiquement disponible (avion au sol, hors mission), reconsidérer un mât 50-80 cm pour gain de portée directe.
- V2 — Tour vraiment démontable rapide : remplacer Molex Micro-Fit + SMA par un connecteur unique board-to-board push-fit (style POGO pins ou docking automotive) pour démontage <10 s sans outil.